
1. Xe tự hành AGV là gì
Xe tự hành AGV (Automated Guided Vehicle) là robot di động có hướng dẫn bằng các line từ, điểm từ được đánh dấu trên sàn hoặc sử dụng sóng vô tuyến, camera quan sát, nam châm hoặc tia laser, lidar để điều hướng nhằm mục đích chở hàng hoá, thiết bị, linh kiện… trong các kho xưởng.
Chúng thường được sử dụng nhiều nhất trong các ứng dụng công nghiệp để vận chuyển vật liệu, sản phẩm xung quanh một tòa nhà công nghiệp lớn, chẳng hạn như nhà máy hoặc nhà kho. Ứng dụng của phương tiện dẫn đường tự động đã được mở rộng trong cuối thế kỷ 20.
2. Các loại công nghệ điều hướng chính
Các công nghệ điều hướng của xe tự hành AGV gồm:
- Công nghệ điều hướng điểm từ, điện từ là công nghệ điều hướng xuất hiện sớm nhất trong lịch sử. Trong công nghệ này, RFID được nhúng và dây kim loại và đặt chìm dưới nền nhà.
- Công nghệ điều hướng dải từ là công nghệ dễ nhận thấy bằng mắt thường nhất, các dải từ được dán trên sàn nhà, AGV nhận tín hiệu từ để di chuyển.
- Ngày nay công nghệ phát triển hơn, nhiều nhà sản xuất sử dụng công nghệ điều hướng tự nhiên, hay còn gọi là SLAM. Công nghệ này sẽ được làm rõ tại phần sau.
- Ngoài ta còn rất nhiều công nghệ điều hướng khác như công nghệ điều hướng quang học, công nghệ điều hướng QR, công nghệ điều hướng quán tính, công nghệ điều hướng tổng hợp….
Các bạn xem thêm các công nghệ điều hướng chi tiết và các loại AGV cũng như đặc điểm của chúng.
3. Công nghệ SLAM sử dụng cho xe tự hành AGV
3.1. Công nghệ SLAM là gì?
Simultaneous Localization and Mapping (SLAM) là công nghệ định vị và lập bản đồ đồng thời. Với công nghệ này, xe tự hành AGV có khả năng dựng lại bản đồ khu vực hoạt động và định hướng chính xác trong bản đồ theo thời gian thực. Ngày nay các nhà máy đều đang hướng tới sử dụng loại điều hướng này vì tính an toàn của chúng.
3.2. Các bước xây dựng hệ thống SLAM
Để xây dựng được bản đồ cho AGV hoạt động, kỹ sư cần làm qua 2 bước là:
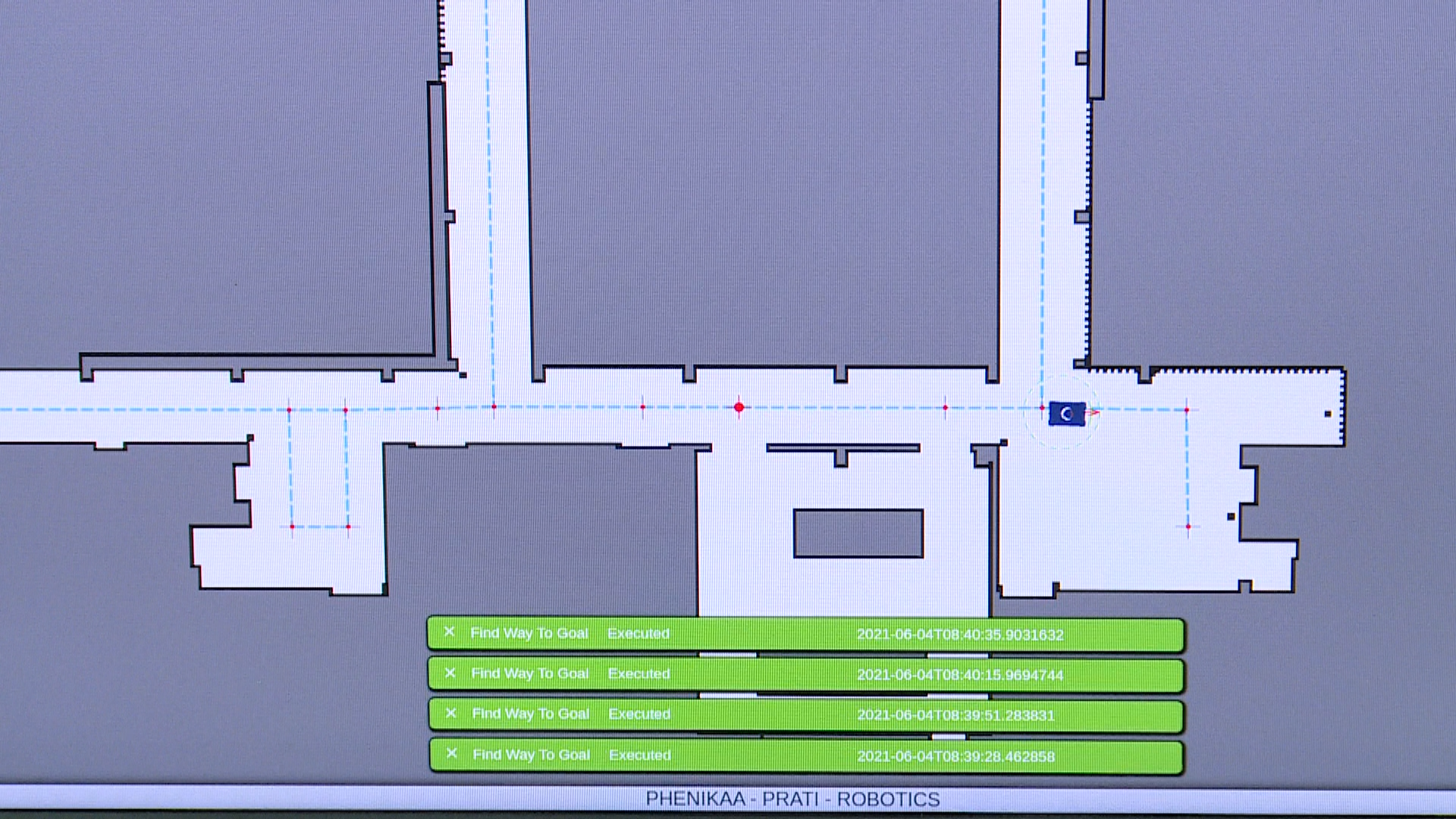
- Xây dựng bản đồ: Trong bước này, các kỹ sư cần cho AGV di chuyển thủ công quanh kho xưởng để lidar quét toàn bộ khu vực và lập bản đồ thô. Sau đó, bộ tích hợp sẽ xóa các đối tượng tạm thời hoặc động (chẳng hạn như hộp, pallet, các phương tiện khác, v.v.) khỏi bản đồ. Kết quả là một bản đồ sạch chỉ bao gồm các đối tượng địa lý tĩnh, vĩnh viễn của địa điểm, chẳng hạn như tường, cột trụ và máy móc cố định. Tiếp đó là đối sánh tính năng để lập được một bản đồ hoàn chỉnh và chính xác.
- Khoanh vùng hoạt động và vẽ bản đồ chi tiết: Sau khi có bản đồ, kỹ sư xác định khu vực hoạt động cụ thể, những cung đường, những điểm dừng, điểm giao…để AGV có thể thực hiện được nhiệm vụ.
Xem AGV hoạt động trong video sau đây bằng công nghệ AGV của Phenikaa-X:
3.3. Tại sao nên sử dụng xe tự hành AGV điều hướng SLAM
Lý do nên lựa chọn AGV điều hướng SLAM:
- Dễ dàng lập bản đồ
- Linh hoạt, có thể dễ dàng sửa đường đi hoặc điều chỉnh AGV có sẵn
- Chi phí thấp, không tốn phí bảo trì.
- Không tốn diện tích, bảo vệ mỹ quan khu vực
Tuy nhiên, điều hướng SLAM có thể phức tạp trong môi trường hỗn loạn và có nhiều sự thay đổi bất ngờ. Robot phải có khả năng “nhìn thấy” một tốt của môi trường nếu không nó sẽ không biết nó đang ở đâu.
Ngay cả khi có một số phần mềm SLAM miễn phí hoặc chi phí thấp, một phần mềm điều hướng SLAM tốt sẽ đắt hơn các phương pháp điều hướng truyền thống khác.
4. Một số mẫu robot sử dụng công nghệ SLAM khác của Phenikaa-X
SLAM AGV của Phenikaa-X được nghiên cứu và xây dựng 100% dựa trên nguồn nhân lực trong nước, sử dụng các thiết bị được nhập khẩu chính hãng từ các quốc gia như Đức, Singapore…

Robot lễ tân / Robot trợ lý Hi-P hiện tại cũng đang sử dụng loại điều hướng SLAM này. Robot có thể đi lại và giao tiếp tự nhiên giống như một cô lễ tân.
Robot khử khuẩn Phenikaa-X sử dụng công nghệ điều hướng SLAM để di chuyển tự nhiên trong các toà nhà, kho xưởng nhằm mục đích khử khuẩn.

Để được tự vấn tốt hơn về các loại sản phẩm vui lòng liên hệ:
- Liên hệ: 086 707 6788
- Truy cập website: https://phenikaa-x.com/
- Gửi email tới: contact@phenikaa-x.com